欧州海上安全レポート
(author)

三好登志行(弁護士、海事補佐人)
きょうどう法律事務所(前佐藤健宗法律事務所)
1.衝突事故発生時の英国等における刑事罰の運用状況等
(1)英国法を中心とした概観について
ア、特別法違反の罪(Specific Maritime Offences)
(ア)COLREGs違反の罪
英国[1]では、Convention on the International Regulations for Preventing Collisions at Sea, 1972 (以下、「COLREGs」という)は、The Merchant Shipping (Distress Signals and Prevention of Collisions) Regulations 1996の4条[2]により、COLREGsのRule 1からRule 36と、付属書のⅠからⅢが国内法化されている。
そして、同法6条1項[3]によれば、COLREGsのRule 10(b)(i) (duty to proceed with traffic flow in lanes of separation schemes) に違反した場合には、5万£以下の罰金が科せられる可能性がある。また、同条2項によれば、その他の違反は法定の罰金刑の上限を超えない範囲で罰金刑となる可能性がある。
英国におけるCOLREGs違反が報告された件数(旗国別)は、下表1のとおりである[4]。
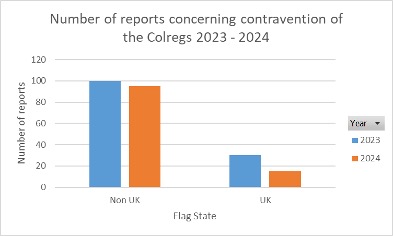
表1
ただし、これらの犯罪の主体は、船舶所有者(“the owner of the vessel”)、船長(“the master”)、船舶の運航に当面責任を負う者(“any person for the time being responsible for the conduct of the vessel”)に主体面で限定がなされている[5]。
(イ)1995年英国商船法(Merchant Shipping Act 1995)違反の罪
英国では、Merchant Shipping Act 1995の58条により、英国船籍船の船長や船員等が義務違反又は義務の懈怠を行ったとき、略式有罪判決の場合には、法定最高額を超えない罰金刑を、起訴により有罪判決を受けた場合には、2 年以下の懲役もしくは罰金、あるいはその両方が科される可能性がある。
また、同法98条により、英国港内又は英国船籍船であればどこの港にいても、危険なほど安全でない場合(“dangerously unsafe”[6])には、船長と船舶所有者は、略式有罪判決の場合には、罰金、又は、 起訴により有罪判決を受けた場合、2 年以下の懲役もしくは罰金、あるいはその両方を課される可能性がある。
イ、一般法違反の罪(General Criminal Liability)
英国では、過失により、人の生命が失われた場合、犯罪が成立する。COLREGsなどの違反により生命が失われた場合には、犯罪が成立し得ることとなる。犯罪行為としては、”gross negligence manslaughter”[7],[8]であり、単純な過失よりも悪意のある心理状態が必要とされる[9]。他方で、ドイツ刑法典222条は、“Whosoever through negligence causes the death of a person shall be liable”と定めており、重過失までは求めておらず、フランスも同様とされる[10]。また、スウェーデン、オランダもほぼ同様であるとされている[11]。
また、英国では、人身傷害については、Offences Against the Person Act 1861 (OAPA 1861)の35条が “carriage or vehicle”の危険な運転(“furious driving”)、故意の違法行為(“wilful misconduct”)、又は意図的な怠慢(“wilful neglect”)による人身傷害の場合には刑罰規定を設けている。しかし、船舶はそもそもcarriage or vehicleに当たらない可能性が高いものと思われる[12]。他方で、ドイツ刑法典229条は過失による人身傷害について3年未満の懲役または罰金を科し、スウェーデンの刑法典8条も、過失による人身傷害について、6か月未満の懲役または罰金を科している[13]。フランスとオランダも同様に過失による傷害に対し刑罰を定めている[14]。
(2)日本法との比較
既知のように、我が国の「海上衝突予防法」(以下、「予防法」という)には、罰則規定がない。
他方で、刑法129条1項は、過失往来危険罪を定め、同条2項は、業務上過失往来危険罪を定めており、予防法に違反し、往来の危険が生じた場合には、罰金刑が科され得る。この意味において予防法そのものには罰則規定がないが、予防法違反により罰則が生じることがあるという意味で、英国のThe Merchant Shipping (Distress Signals and Prevention of Collisions) Regulationsの6条2項と過失往来危険罪が同様の機能を果たし得ることとなる[15]。
また、我が国は、過失による船舶の衝突により、生命が侵害された場合には、重過失ではなく単なる過失により、業務上過失致死罪が発生する可能性があり(刑法211条)、英国よりも犯罪の成立範囲は広く、ドイツ、フランス等と同様であるものと思われる。また、過失による船舶衝突により、身体が傷害された場合には、業務上過失致傷罪が成立する可能性があり(同前)、英国では不可罰である可能性の高い人身傷害を犯罪として捉えていることとなる。もっとも、ドイツ、フランスも我が国と同様、人身傷害に対しても、過失があれば犯罪となることを認めており、我が国が取り立てて変わった法制度を敷いているというものでもない。
2.COLREGs改正の動向及び有識者の意見等
2023年5月から6月にかけて行われたMSC107では、現時点では、MASSにCOLREGSを適用するためには改正の必要がないことが確認された[16]。
もっとも、我が国の海上衝突予防法の条文上、予防法5条の「視覚、聴覚及びその時の状況に適した他のすべての手段により、常時適切な見張り」を行うことや、予防法3条11項の「互いに他の船舶の視野の内にある」の文言等について、解釈上、不明確な点がないとは言えない。
英国のMaritime & Coastguard AgencyのNavigation Technologyの担当者との話では、英国において現在、具体的な改正に向けた動きはないこと、個人的な立場と留保を付けつつ明確化のため改正したほうが良いと思う条項がいくつかあることといった意見を確認することができた。
また、DPS([17]Dynamic Positioning System, 自動船位保持装置)のマネジメント等を行い、ISWG3-MASSにも出席していた船長経験者であるNautical Institute の担当者に対するヒアリングでは、同様に個人的な意見と留保を付けつつも、予防法5条については、カメラの基準を作成することの必要性や、カメラの画像を転送するには非常に時間を要するが、聴覚的な情報については容量が軽く、カメラの画像情報よりも対応が容易であること、加えて、小型船舶が存在する海域で視界制限状態となった場合には、依然として聴覚的情報が重要であることや、さらにMASSに特化した灯火については、必要であろうという意見を聞くことができた。
3.MASSに関するIMOでの議論状況及び自動運航船の技術的側面に関する主な概念
MSC108では、コレスポンデンスグループ(作業グループ)からの報告や関連の作業グループによる会合結果に基づき、目標及び安全性・オペレーション・セキュリティー等の項目毎の機能要件を規定した、自動運航船に関する非強制コードの策定作業が進められ、審議の結果、コレスポンデンスグループを設置すると共に、2024年9月に中間作業会合を開催して、非強制コードの策定作業を進めることが合意された[18]。機能要件の位置付けについては、GBS(Goal Based Standard)のTier 2レベルとなる[19]。そして、2024年9月に開催されたMASS-ISWG3では、MASS CODEの28あるChapterのうち、1 Purpose, principles and objectives, 2 Application, 3 Code Structure, 6 Approval process, 7 Risk assessment, 9 System design, 10 Software principles, 17 Safety of navigation, 20 Fire protection, fire detection and fire extinctionまでについて起草作業が終了している[20]。そこでは、Operational Envelope(OE), Operational Design Domain(ODD), Concept of Operation(ConOps) といった重要な概念について議論がなされた[21]。
自動運航船に関する基本的な概念として、“Autonomous Navigation System(ANS、自動運航システム) ”、 “Concept of Operation (ConOps)”、 “Operational Design Domain”(運航設計領域)、“Operational Envelope”(運用領域)、“Acceptable Risk Condition (ARC)”、“Minimal Risk Condition (MRC)”、“Minimal Risk Manoeuvre (MRM)”、“Situational awareness”(状況認識)、“Override and fallback response”(オーバーライドとフォールバック反応)いったものがある[22],[23]。これらの概念を正確に理解し、また実際の運航においてどのように用いられるのかは、法的評価を行う上では極めて重要である。さらに、運航する人の側の資格、見張りの要件は、今後、STCW条約等において整理されていくものと思われるが現時点においては、具体的な議論は始まっていない。
4.刑事責任の有無
(1)避航船が他船との関係で保持船となり得る場合の衝突事故発生時の刑事責任
以上の議論を踏まえて、以下の設例〔1〕における刑事責任を検討する。検討の関係上、A船、A船の船長を含む船員、A船のROC(リモートオペレーションセンター)の所在地、A船のROCの職員の国籍、B船、B船の船長を含む船員、事故発生地は、全て日本国内、日本国籍又は日本船籍であるもとする。
ア、設例〔1〕
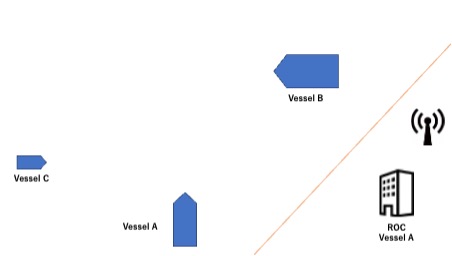
A船がROCからの遠隔操船により、ブリッジ上に当直航海士なくして、日本の領海内を航行中であった。予防法上横切り船の航法が適用され、A船は避航船、B船は保持船であったところ、A船のROCのオペレータ―は、A船で降橋中であるが当該時間帯において担当の航海士と無線で通信した。両者は、ROCから遠隔操船を継続すること、避航船であることから、ANSに委ね自動的に避航操作を取ることを期待すること、それを踏まえてA船の当該航海士が昇橋しないことを相互に確認したものの、C船との関係では、C船がレーダーレンジの外にあったため、A船が保持船、C船が避航船となることについて、当該航海士もオペレーターも確認していなかった。その後、ANSがC船との関係を優先し保持船となることを選び、フォールバックの指示がANSからは出ず、ANSは針路・速力の保持を選んだため、その後しばらくして、B船との衝突の危険が高まったとして警告が出たため、A船の航海士は昇橋すると同時に、ROCのオペレーターは手動に切り替え衝突回避動作を行ったものの、結果として、A船はB船と衝突した(B船のハンドレールにA船が接触し破損したものの、幸いけが人はいなかった)。
図1 設例〔1〕の状況
イ、設例〔1〕における罪責
このような事案において、A船の当直航海士、又は、ROCのオペレータ―は何らかの刑事責任を負うであろうか[24]。
まず、「往来の危険」とは往来の安全を害すべきおそれのある状態、すなわち、汽車・電車の脱線、汽車・電車・艦船の転覆、衝突、破壊など、その往来に危険な結果を生ずるおそれのある状態を発生させることをいうとされている[25]。本件では、A船とB船との衝突により両船が接触しB船のハンドレールが破損し、一歩間違えれば艦船が転覆する危険が生じることから、往来の危険は存在する。
それでは、業務上の「過失」は認められるであろうか。また認められるとした場合、誰に認められるのか。
本件では、まず、A船のANSがどのように設計・設定されていたのかが問題となる。3船以上の避航操船に弱さがあったり、あるいは、船員の常務(予防法39条)によって避航関係が決まるものについて避航性能の限界が事前に示されていたのであれば、予見可能性はあったと言えよう(事前に示されていなくとも、日ごろの操船から、一定の条件下、シチュエーションにおける避航操船の弱点を具体的に把握し、本件の状況がそれに類似する状況を認識していた場合も同様である)。この限界を示すものの1つがOD、ODDとなろう(もっとも、有人操船の場合であっても、結果回避が難しいような場合には結果義務が否定されることはあり得る)。また、そのような3船以上の関係での衝突については、適切な操船がANSによってなされず、衝突の危険が生じることについて、認識が可能であった以上、結果回避義務が肯定され、事案にはよるものの、過失が認められる余地は十分存在する。
それでは、仮にそのような過失があったとして、A船の当直航海士、AのROCのオペレータ―いずれが刑事責任を負うのか[26]。
上記設例においては、いわゆるB0(Bridgeにおける見張が0の状態)であったことから、第一義的に見張り、状況認識、避航動作の決定を行うべき者は、ROCのオペレータ―であることとなる。これは、既存船において、船長が当直航海士に見張りを任せ、降橋した場合と似た側面を持つ。両者の共通点は、避航操船について最終的な意思決定の主体となり得たか否か、因果の流れが存在するか否かであろう。
このように考えた場合、ROCのオペレータ―がANSの操船に介入しなかったという不作為が過失の実行行為となろう。そして、その前提として、当該ANSの性能について十分に把握し、性能に従った操船をすべき義務が認められよう(実際の刑事裁判の認定では、攻撃防御の対象の明確化のため、より具体的な事実・評価としての、ROCのオペレータ―が取るべきであった作為が措定されよう。このとき、前記3で述べたような、そもそも、どの範囲でANSが適切に避航操船を取るように設計されていたのか、設計範囲で実際、期待された性能が発揮されていたのか、実験時のデータと実際の操船との齟齬ないしそれらの情報をROCのオペレータ―及び航海士に提供されていたのか、あるいは知るべきであったのか否かにより、結論に至る認定は異なる。この意味で、適切な法的評価を行うためには、当該状況におけるConOps, ANS、OE及びODDの正確な理解が不可欠となる)。なお、A船に在船している船長、あるいは、ROCにおいて運航の管理責任を負う地位にある者については、別途管理監督過失を検討することもできるが本稿では紙片の都合上、立ち入った検討は控えることとする。
以上より、本件においては、より詳細な証拠関係にその結論は左右されうるものの、A船のROCのオペレータ―は、業務上過失往来危険罪の罪責を負う可能性は十分に存在する。
(2)無人船の故障等による衝突事故発生時の刑事責任
続いて、以下の設例〔2〕について検討する。検討の関係上、A船、A船の船長、航海士、AのROCの所在地、ROCのオペレータ―、事故発生地は、全て日本国内、日本国籍又は日本船籍であるものとする。
ア、設例〔2〕
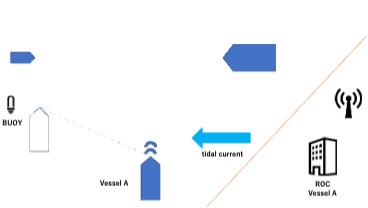
日本の領海内を航行していたA船には、航海士・機関士・甲板部員全ての人が船上にはいなかった。A船のANSの設計では、通常の航行速度12ノットとされており、潮流が5ノット以上、又は平均風速がが10メートル/秒以上になった場合には、ROCからの手動での操作が必要とされていた。
A船のANSは、他船と横切り船の関係になり、A船が避航船となるため、また他船との関係もあり、自動的に速度を落とし速力は時速6ノット程度になってしまった。またA船が操船していた海域は、潮流が4.5ノットの西流があり、風は、風力4(風速は平均で8メートル/秒程度)の東風であり、時間帯は夜間であったものの、視程は6マイル程度と良好であった。
ROCのオペレータ―は、船長からの事前の指示を受け、輻輳関係になったことから、適切にモニターを監視していた。
A船は、速力が6ノット程度になったところ、折からの西流を受け、舵が効きづらくなり、A船からのANSから、船位・船速が不保持であることを原因とする警告がでるとともに、それを把握したROCのオペレータ―は、手動操船に切り替えたものの、灯浮標と接触し、舵を損傷し、A船は漂流を始めた。付近には、漁船を含め、数隻の貨物船が航行していた(図2。漁船等は記載を省略している)。
図2 設例〔2〕の状況
イ、設例〔2〕における罪責
事案として少し詳細ではあるものの、ANSやOD、ODDを理解するためにはこの程度の詳細さは必要であろう。
まず、本件において、往来の危険は認められるか。船上に人がおらず、一見人身に対する危険が認められないように見えるため問題となる。
判例によれば、独立に航行し得ない被曳船を海上に漂流させる行為は、その被曳船自体の往来の危険があるだけでなく、その海面を航行する他の艦船の往来に対しても危険がある[27]としている。本件においては、A船が漂流し、他船も複数存在したというのであるから、往来の安全を害すべき状態にあったと言えよう[28]。
次に、本件では過失が認められるのか。
本件での問題は、ANSで予め設定された条件についてのROCのオペレータ―の理解である。各条件がA&B&Cであるのか、それとも、A or B or Cであるのか、ここに対する開発側と操船側の相互理解は極めて重要である。ANSの側から手動へ切り替えるよう注意喚起がされた場合に、どのタイミングで手動に引き取るのか、ANSの仕様、特性を十分把握した上での操船が必要となろう。
その上で、本件においては、本船及び海域の特性上、時速6ノットであれば舵が効きづらくなることを予め予見すべきであったということは一応可能である。もっとも、本件ではANSによる減速と潮流の向きと速度が大きく影響している。そうだとすれば、予め当該海域通航時(実際は航海計画の確認時)、本件のような事態が起こることを前提に手動操船に切り替えておくべきであったともいえる。さらには、ANSの側において、速力が大幅に減速する場合には予め注意喚起を行うよう設計しておくべきであったのではないかともいえる(この点もそもそもどのような設計をし、どのような性能を持ったANSなのかについての正確な理解が必要となる。加えて、船種によっても、舵効は異なることから、当該船舶における、実質的な性能の適切な認識が肝要となる)。加えて、そもそも本船に潮流計が付いていたのか否かも問題となろう。潮流計がなければ、一定の流速が予見できる地域において(他船との衝突回避のための減速は通常、想定されるものであろう)は、適切な船位保持の観点からは、ANSの使用を差し控えるべきかもしれない。
このように複数の当事者の過失が複合して、往来危険が生じた場合には、過失の認定が極めて難しくなるものである。
本件では、ROCのオペレータ―にとって、流速が予見でき、輻輳性に伴う減速、及びそれらに伴う船位保持の不能が予見できたのであれば、そのような結果は回避すべきであるから、ROCのオペレータ―の過失を認めることができる可能性もあろう。その場合には、業務性や因果関係も認められることを条件に、ROCのオペレーターは、業務上過失往来危険の罪責を負う。
なお、上記は架空の事案であることから、実際には、ANSの性能、それに対するオペレーター等操船側の熟知、実際の気象、海象などが極めて重要なポイントとなってこよう。
4.まとめ
上記事案で検討したように、MASSのANSの概要が徐々に明らかになるに従い、どこまでを機械(システム)に任せて良いのか、また、機械(システム)の側はどのような特性を持っているのか、それにふさわしい安全な航行の範囲の取り方を検討する必要があろう。
もっとも、自動運航船は開発も途上であり、未知の危険もあるものの、刑事罰による過剰な委縮効果が出ることは好ましくないものと思われる。上記2事例で検討したように、自動運航船の過失往来危険罪の成否においては、予見可能性が大きく問題になるように思えることから、自動運航船の広義での操船者(ROCのオペレータ―を含む)は、当該ANSの一般的な性能、一定の気象、海象においての具体的な性能、また、当該船舶に搭載され運航された際の性能を適切に把握することが求められる。
以上
[1] 以下では特に断りのない限り、英国又はイギリスと記載した場合には、England and Walesを指すものとする。
[2] https://www.legislation.gov.uk/uksi/1996/75/regulation/4/made
[3] https://www.legislation.gov.uk/uksi/1996/75/regulation/6/made
[4] 本データは、Maritime and Coastguard Agencyの関係者から情報提供を得たものである。この場を借りて御礼を申し上げる。
[5] なお、このほか、被害の客体として財物を対象とする罪に対する犯罪、法人の犯罪、環境汚染の犯罪という視点も存在するが、本報告書では、COLREGsに違反した場合の人身に対する罪を中心に報告を行う。
[6] “dangerously unsafe”の定義は、同法94条において規定されているが、本報告書では立ち入った検討は差し控えることとする。
[7] 英国のThe Crown Prosecution Service の定義によれば、Conduct that was grossly negligent given the risk of death, and did killがその1例とされている。日本の刑法典でで、そのまま該当し得る犯罪類型はないと思われるが、重過失致死に近いものであると思われる。
[8] The Crown Prosecution Serviceによる説明は、以下のリンクから確認できる(最終確認日2024年9月17日)。https://www.cps.gov.uk/legal-guidance/homicide-murder-manslaughter-infanticide-and-causing-or-allowing-death-or-serious#:~:text=Where%20an%20unlawful%20killing%20is,the%20same%20as%20for%20murder.
[9] A. Ntovas, M. Tsimplis, R. Veal, S. Quinn, A. Serdy, 2016, “Liability for operations in unmanned maritime vehicles with differing levels of autonomy”, University of Southampton, Institute of Maritime Law, Southampton, pp.175.
[10] 前掲注5
[11] 前掲注6
[12] 前掲注6, pp.176
[13] 前掲注6
[14] 前掲注6
[15] その実態については、今回の調査ではフォローしきれなかったことから、今後の課題としたい。
[16] IMO Maritime Safety Committee (MSC 107), https://www.dnv.com/news/imo-maritime-safety-committee-msc-107–244383/, (最終確認日2024年9月19日)
[17] 例えば、村田航『Dynamic Positioning System 自動船位保持装置‐定点保持のための最新技術』(日本マリンエンジニアリング学会誌 第53巻 第4号(2018)85頁)等が詳しい。
[18] Class NK『IMO MSC108 審議速報』(https://www.classnk.or.jp/hp/pdf/info_service/imo_and_iacs/MSC108_sum.pdf、2024年10月2日最終閲覧)
[19] GBSやTier2についての考え方については、例えば、小川剛孝・戸澤秀『目標指向型新造船構造基準(GBS)策定とその動向について』海上技術安全研究報告書12巻4号(特集号)平成24年小論文23, https://www.nmri.go.jp/service/repository_data/PNM21120404-00.pdf(最終確認日2024年9月19日)。
[20] “Towards the finalization of the IMO MASS Code”, https://www.ntnu.edu/documents/1343102256/1361212906/s7-ID6_Sifis-Papageorgiou_Towards+the+finalization+of+the+IMO+MASS+Code.pdf/dca58522-12b1-f563-1b6b-cdb917f1a6aa?t=1730812882582, 2024年11月23日最終閲覧)
[21] 前掲注18
[22] SOLAS条約及びMASS CODEで重要となる各概念の説明については、例えば、一般財団法人 日本海事協会技術研究所『WHITE PAPER自動運航、自律運航の社会実装に向けて』やISO/TS 23860などにおいて定義の確認がなされている
[24] 実際に運用されるANSは、このような事態ではフォールバックの指示を出す可能性が十分存在すると考えられるが、設例としては、いったんこのように仮定する。なお、輻輳性が増せば、本件のような事案もあり得なくはないものと思われる。
[25] 最判昭和35年2月18日刑集14巻2号138頁
[26] いわゆる「過失の共同正犯」の問題としてA船の当直航海士とAのROCのオペレータ―の共同正犯を検討することは可能であるものの、事案を単純化するため、本報告書の設例においては、A船の当直航海士、AのROCのオペレータ―それぞれについて罪責を検討する。過失の共同正犯を巡る問題については、例えば、松宮孝明『「明石歩道橋事故」と過失犯の共同正犯について』立命法学338号(2011年4号)1917-1967頁などが詳しい。
[27] 大判昭和2年11月28日刑集6巻472頁
[28] 実際の事実認定においては、周囲何マイル以内に何隻程度、またその距離ないし他船の速力といった事実も必要となろう。
本稿は、『船舶の自動運航(MASS)と刑事責任-専門性と新技術に関する観点から-』海事法研究会誌266号2頁執筆のもととなった調査報告事業である。
本記事は、2024年11月時点での情報に基づくものであり、その後、IMOでの議論等により、法的な解釈がより具体化している部分もある。適宜、最新の情報を確認される必要がある。
- No.26-16「旧 Autonomous Ship Expo 参加報告」
- No.26-15「月刊レポート(2026年6月号)」
- No.26-14「海外情報 ホルムズ通航指針 発表」
- No.26-13「海外情報 難民救助ガイド改訂」
- No.26-12「月刊レポート(2026年5月号)」
- No.26-11「海外情報 S-A-S 2026 参加報告」
- No.26-10「特集 ドローン規制と運用実態」
- No.26-09「特集 無人運航船の法的責任(英国)」
- No.26-08「月刊レポート(2026年4月号)」
- No.26-07「海外情報 Seabot Maritime社 訪問」
- No.26-06「特集 無人運航船導入PTの動向②」
- No.26-05「海外情報 OI-2026 参加報告」
- No.26-04「月刊レポート(2026年3月号)」
- No.26-03「海外情報 国際救難連盟の活動紹介」
- No.26-02「月刊レポート(2026年2月号)」
- No.26-01「月刊レポート(2026年1月号)」
- No.25-12「特集 2025 年欧州動向と今後」
- No.25-11「月刊レポート(2025年12月号)」
- No.25-10「海外情報 MASS Sympo 参加報告」
- No.25-09「月刊レポート(2025年11月号)」
- No.25-08「海外情報 ICMASS-2025 参加報告」
- No.25-07「月刊レポート(2025年10月号)」
- No.25-06「特集 無人運航船導入PTの動向」
- No.25-05「月刊レポート(2025年9月号)」
- No.25-04「月刊レポート(2025年8月号)」
- No.25-03「月刊レポート(2025年7月号)」
- No.25-02「特集 無人運航船の法的責任(考察2)」
- No.25-01「特集 無人運航船の法的責任(考察1)」
- No.24-01「海外情報 ⾃律船舶での衝突回避の未来」